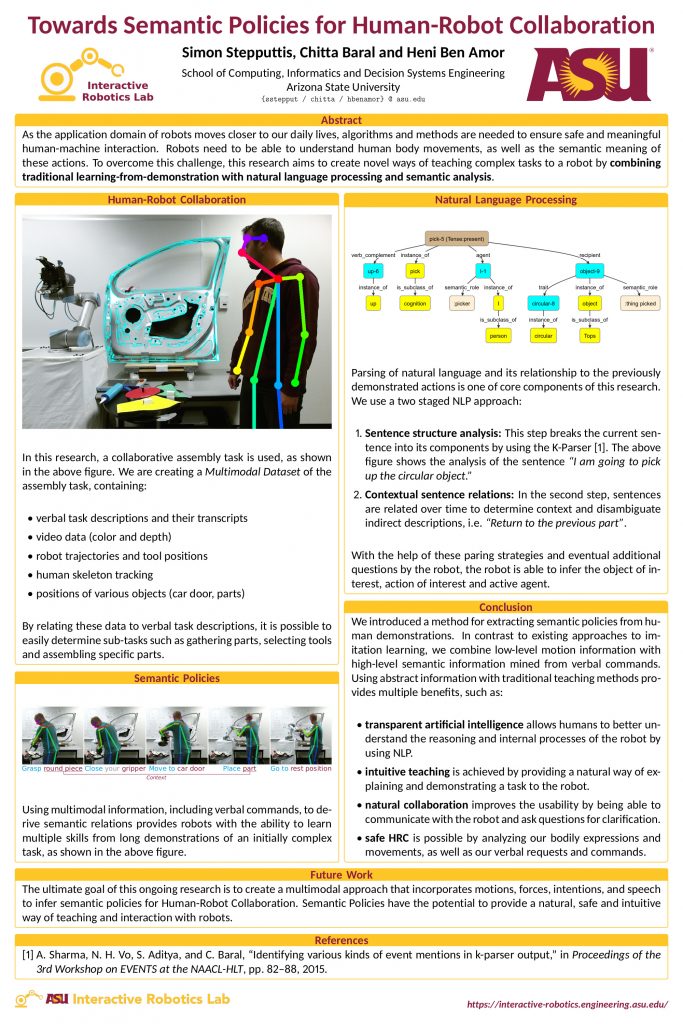
Towards Semantic Policies for Human-Robot Collaboration
Southwest Robotics Symposium (SRS), 2018
Workshop
Abstract
As the application domain of robots moves closer to our daily lives, algorithms and methods are needed to ensure safe and meaningful human-machine interaction. Robots need to be able to understand human body movements, as well as the semantic meaning of these actions. To overcome this challenge, this research aims to create novel ways of teaching complex tasks to a robot by \textbf{combining traditional learning-from-demonstration with natural language processing and semantic analysis.
Poster
Tags