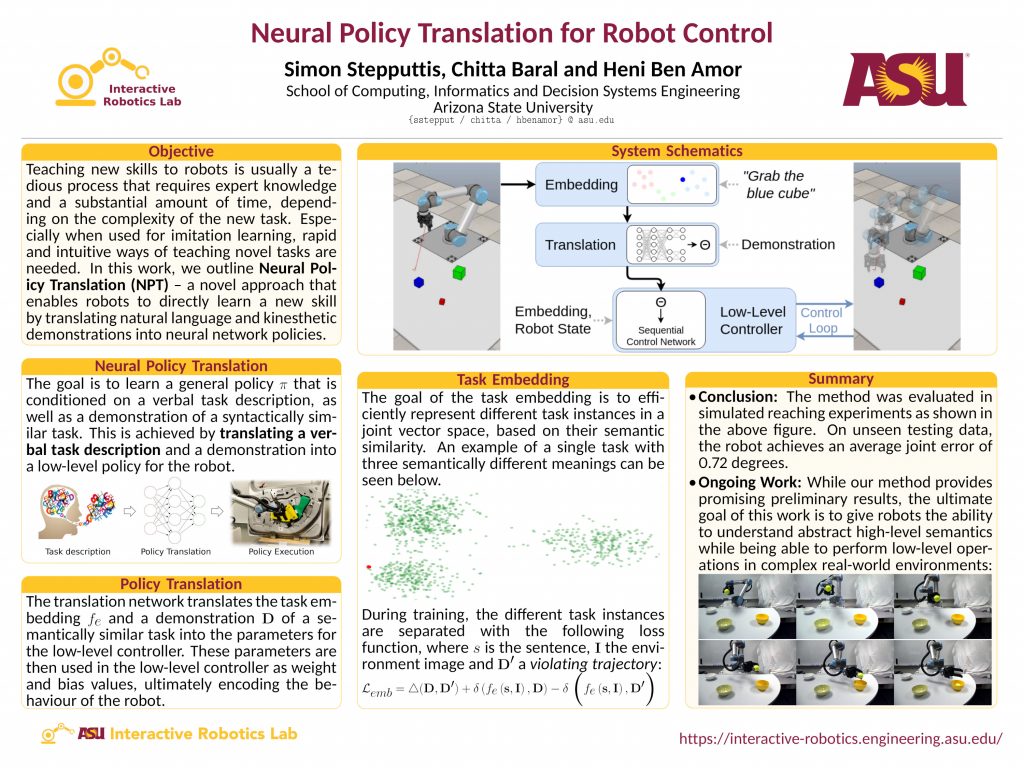
Neural Policy Translation for Robot Control
Southwest Robotics Symposium (SRS), 2019
Workshop
Best Poster Award by NVIDIA
Abstract
Teaching new skills to robots is usually a tedious process that requires expert knowledge and a substantial amount of time, depending on the complexity of the new task. Especially when used for imitation learning, rapid and intuitive ways of teaching novel tasks are needed. In this work, we outline Neural Policy Translation (NPT) – a novel approach that enables robots to directly learn a new skill by translating natural language and kinesthetic demonstrations into neural network policies.
Poster
Tags